 English
English Espaol
Espaol Franais
Franais 阿拉伯
阿拉伯 中文(簡)
中文(簡) Deutsch
Deutsch Italiano
Italiano Português
Português 日本
日本 韓國
韓國 български
български hrvatski
hrvatski esky
esky Dansk
Dansk Nederlands
Nederlands suomi
suomi Ελληνικ
Ελληνικ 印度
印度 norsk
norsk Polski
Polski Roman
Roman русский
русский Svenska
Svenska
卡特CAT發(fā)動機轉速/正時傳感器電路測試的故障原因與維修技術
卡特CAT C11與C13發(fā)動機轉速/正時傳感器電路 - 測試的故障原因與維修技術
系統(tǒng)運作描述:
按照本步驟,進行以下傳感器任何可疑故障的診斷與排除:
主發(fā)動機轉速 / 正時傳感器 輔助發(fā)動機轉速 / 正時傳感器本步驟涉及以下故障診斷代碼:
190-08 發(fā)動機轉速信號異常 342-08 輔助發(fā)動機轉速信號異常發(fā)動機使用兩個發(fā)動機轉速 / 正時傳感器。 輔助發(fā)動機轉速 / 正時傳感器用于監(jiān)測凸輪軸齒輪,而主發(fā)動機轉速 / 正時傳感器用于監(jiān)測曲軸齒輪。 兩個發(fā)動機轉速 / 正時傳感器都可以通過各個齒輪的獨特結構檢測發(fā)動機轉速和正時的基準。隨著齒輪的轉動,電子控制模塊(ECM)會計算傳感器產生的兩個脈沖的間隔時間來確定轉速。
為了便于起動,在正常工作情況下,輔助發(fā)動機轉速 / 正時傳感器用于確定正時。 輔助發(fā)動機轉速 / 正時傳感器用于確定何時 1 號氣缸中的活塞位于壓縮沖程的上止點。 確定正時后,主發(fā)動機轉速 / 正時傳感器則用于確定發(fā)動機轉速,同時忽略輔助凸輪軸傳感器送來的信號。
找到 1 號氣缸后,ECM 以正確發(fā)火順序和正確的單體噴油器正時依次觸發(fā)每個氣缸。實際的正時和每次噴油持續(xù)時間根據發(fā)動機轉速和負載確定。 如果發(fā)動機運轉過程中主發(fā)動機轉速 / 正時傳感器送來的信號缺失,則在 ECM 使用輔助發(fā)動機轉速 / 正時傳感器值替代時會發(fā)現(xiàn)發(fā)動機性能稍有變化。如果發(fā)動機運轉過程中輔助發(fā)動機轉速 / 正時傳感器送來的信號缺失,則不會導致發(fā)動機性能發(fā)生明顯變化。 但是,如果起動過程中沒有輔助發(fā)動機轉速 / 正時傳感器送來的信號,則可能出現(xiàn)以下情況:
發(fā)動機可能需要稍長的起動時間。 在 ECM 只采用主發(fā)動機轉速 / 正時傳感器來確定正確的點火順序之前,發(fā)動機可能會粗暴運轉幾秒鐘。即使兩個傳感器中只有其中一個傳感器的信號存在,發(fā)動機也將會起動和運轉。如果發(fā)動機運轉過程中這兩個傳感器送來的信號全都缺失,則會導致由 ECM 中止噴油并關閉發(fā)動機。 如果在起動期間來自兩個傳感器的信號都丟失,發(fā)動機將會無法起動。
這兩個傳感器都是有整體式接頭的磁力傳感器。這兩個傳感器不能互換。 請勿調換這兩個傳感器的位置。 如果只是更換了這兩個傳感器,沒有必要對發(fā)動機進行正時標定。
注: 在安裝傳感器時應完成以下所有任務:
用機油潤滑 O 形圈。 在擰緊支架螺栓之前,確保傳感器完全座入發(fā)動機中。 確保接頭正確鎖定。 確保正確固定線束,確保束帶位于正確位置。窗體底端
|
轉速 / 正時傳感器原理圖 |
測試步驟 1. 檢查電氣接頭和線路
斷開 ECM 的電源。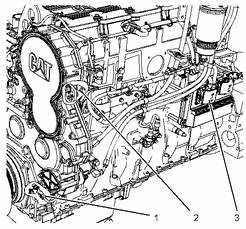
|
發(fā)動機左視圖(典型示例) (1) 主轉速 / 正時傳感器接頭 (2) 輔助轉速 / 正時傳感器接頭 (3) P2 ECM 接頭 |
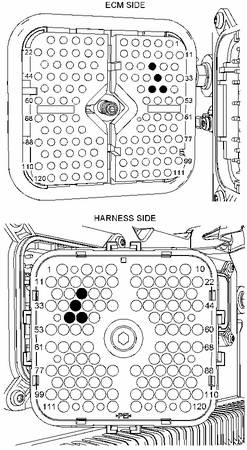
P2 接頭
(P2-25) 主發(fā)動機轉速 / 正時信號(負極)
(P2-35) 主發(fā)動機轉速 / 正時信號(正極)
(P2-46) 輔助發(fā)動機轉速 / 正時信號(正極)
(P2-47) 輔助發(fā)動機轉速 / 正時信號(負極)
|
發(fā)動機轉速 / 正時傳感器接頭 (1) 轉速 / 正時傳感器(負極) (2) 轉速 / 正時傳感器(正極) |
預期結果:
所有接頭、觸針和插孔都應徹底聯(lián)接和 / 或完全插接。 線束和線路應無腐蝕、磨損和擠壓的地方。
結果:
正常 - 線束和線路看起來正常。 繼續(xù)測試步驟 2。 不正常 - 接頭和 / 或線路有問題。修復: 修理和 / 或更換接頭或線路。 確保所有接頭的密封正確就位,接頭徹底聯(lián)接。確認修理已排除故障。
停止
測試步驟 2. 檢查有無激活的診斷代碼
將 Caterpillar 電子技師 (ET) 連接到維修工具接頭上。 恢復 ECM 的電源。 啟動并運轉發(fā)動機。 發(fā)動機處在任何工作溫度故障都有可能會出現(xiàn)。 但是,故障最有可能在發(fā)動機處在正常工作溫度時出現(xiàn)。 如果發(fā)動機無法起動,應在發(fā)動機起動盤車時在 Cat ET上監(jiān)視發(fā)動機轉速。 發(fā)動機起動盤車時,Cat ET可能需要由另外的蓄電池來供電。 這樣做可使 Cat ET不會復位。注: 初始起動盤車時,發(fā)動機轉速狀態(tài)可能會指示發(fā)動機轉速信號異常。 一旦 ECM 能夠從轉速信號計算出發(fā)動機轉速,此信息就應被此發(fā)動機轉速取代。
檢查有無下列任一激活或記錄的診斷代碼: 190-08 發(fā)動機轉速信號異常 342-08 輔助發(fā)動機轉速信號異常預期結果:
上述代碼之一為激活或記錄狀態(tài)。
結果:
沒有發(fā)動機轉速顯示 - Cat ET 沒有顯示發(fā)動機轉速。 繼續(xù)測試步驟 3。 激活或記錄的代碼 - 存在激活或記錄的發(fā)動機轉速 / 正時傳感器診斷代碼。 繼續(xù)測試步驟 4。 沒有代碼 - 沒有激活或記錄的代碼。修復: 請參閱故障診斷與排除, "沒有診斷代碼時進行故障診斷與排除"中相應的故障現(xiàn)象。
停止
測試步驟 3. 檢查傳感器組件的安裝情況
斷開 ECM 的電源。
|
傳感器安裝 (4) 安裝面 (5) 法蘭 (6) 支架 |
檢查支架 (6) 。 確認支架牢固地固定傳感器法蘭,使其與安裝面平齊。
確認支架沒有彎曲。 如果支架彎曲或有障礙物阻止正確安裝傳感器組件,發(fā)動機將無法起動。
注: 不能單獨更換支架。
|
發(fā)動機速度 / 正時傳感器 (7) 支架 (8) 輔助發(fā)動機轉速 / 正時傳感器 (9) 安裝板 (10) O 形密封圈 (11) 支架 (12) 主轉速 / 正時傳感器 |
預期結果:
所有 O 形密封圈都應正確安裝,沒有損壞。 支架應沒有損壞。
結果:
正常 - O 形密封圈安裝正確。 支架和密封圈沒有損壞。修復: 進行下述步驟來正確安裝傳感器組件:
用機油潤滑 O 形圈。 使各個傳感器完全座入殼體中。注: 如果不能使傳感器組件完全座入發(fā)動機中,則應更換傳感器組件。
擰緊支架 (7) 和 (11) 上的螺栓。 連接接頭,確認接頭的鎖耳鎖定牢靠。 確保正確固定線束,確保束帶置于正確位置。繼續(xù)測試步驟 4。
不正常 - 至少有一個傳感器組件的部件有問題。修復: 獲取一個新的傳感器組件。 進行下述步驟來正確安裝傳感器組件:
注: 請勿調換傳感器的位置。 傳感器不能互換。 更換傳感器時不需要正時標定。
用機油潤滑 O 形圈。 使傳感器完全座入殼體中。 擰緊支架螺栓。 連接接頭,確認接頭的鎖耳鎖定牢靠。 確保正確固定線束,確保束帶置于正確位置。確認故障已排除。
停止
測試步驟 4. 通過發(fā)動機線束測量傳感器電阻
斷開 P2 接頭。 進行下述步驟來測量主發(fā)動機轉速 / 正時傳感器的電阻: 測量 P2-35(主發(fā)動機轉速/正時傳感器正極)與 P2-25(主發(fā)動機轉速/正時傳感器負極)之間的電阻。電阻 ... 110 到 200 歐姆
進行下述步驟來測量輔助發(fā)動機轉速 / 正時傳感器的電阻: 測量 P2-46(輔助發(fā)動機轉速/正時傳感器正極)與 P2-47(輔助發(fā)動機轉速/正時傳感器負極)之間的電阻。電阻 ... 1000 至 1200 歐姆
預期結果:
電阻測量值在技術規(guī)格范圍內。
結果:
正常 - 電阻測量值在技術規(guī)格范圍內。修復: 傳感器和線束沒有問題。 更換 ECM。 請參閱故障診斷與排除, "更換 ECM"。
停止
不正常 - 讀數不符合技術規(guī)格。 通過發(fā)動機線束測量傳感器電阻時電阻值不在容許范圍內。 繼續(xù)測試步驟 5。測試步驟 5. 測量傳感器的電阻
從可疑傳感器上斷開發(fā)動機線束。 對于主發(fā)動機轉速 / 正時傳感器,測量 J401-2(主發(fā)動機轉速/正時傳感器正極)與 J401-1(主發(fā)動機轉速/正時傳感器負極)之間的電阻。電阻 ... 110 到 200 歐姆
對于輔助發(fā)動機轉速 / 正時傳感器,測量 J402-2(輔助發(fā)動機轉速/正時傳感器正極)與 J402-1(輔助發(fā)動機轉速/正時傳感器負極)之間的電阻。電阻 ... 1000 至 1200 歐姆
預期結果:
可疑傳感器的電阻測量值在技術規(guī)格范圍內。
結果:
正常 - 可疑傳感器的電阻測量值在技術規(guī)格范圍內。修復: 發(fā)動機正時 / 轉速傳感器與 ECM 之間的線路有故障。 問題可能出在接頭上。 修理線路和 / 或接頭。 如有必要,更換零件。應使用雙絞線。 所有新線路每英寸必須至少絞接一次。 確認故障已排除。
停止
不正常 - 可疑傳感器的電阻測量值不在技術規(guī)格范圍內。修復: 傳感器有問題。 更換傳感器組件。請勿調換傳感器的位置。 傳感器不能互換。 更換傳感器時不需要正時標定。 進行下列程序以便更換傳感器組件:
使用機油潤滑新傳感器的 O 形密封圈。 使傳感器完全座入殼體中。 擰緊支架螺栓。 連接接頭,確認接頭的鎖耳鎖定牢靠。 確保線束固定在正確的位置。 確認故障已被解決。杭州 裝載機維修,舟山鏟車修理,柳工裝載機維修,柳工裝載機寧波維修,張家界鏟車維修
400-100-8969???15088860848
0574-26871589? 15267810868
0574-26886646? 15706865167
0574-26871569 18658287286
